If you are attending DEFCON 32, meet us at our DEFCON vendor booth to have your bladeRF 2.0 micro calibrated!
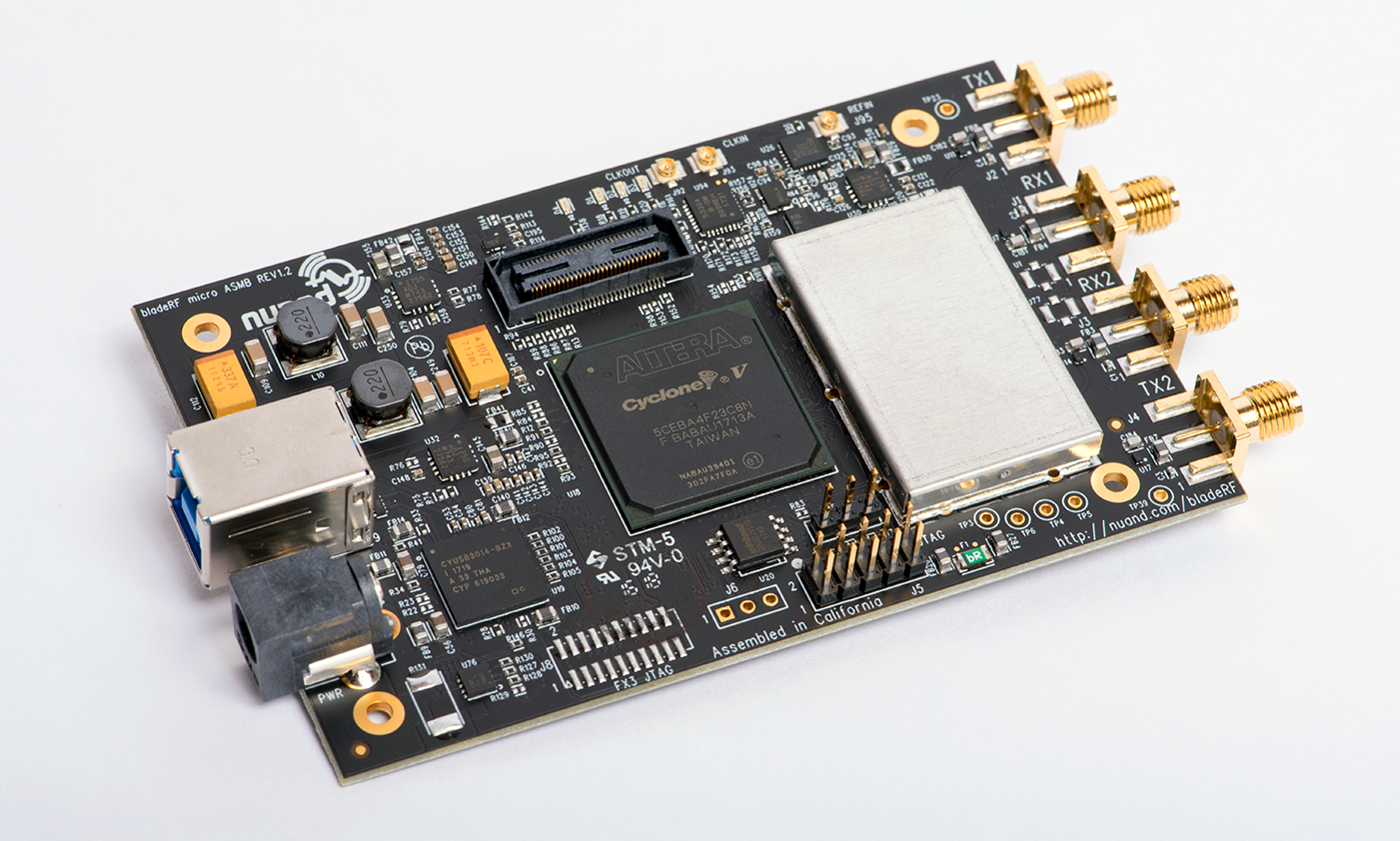
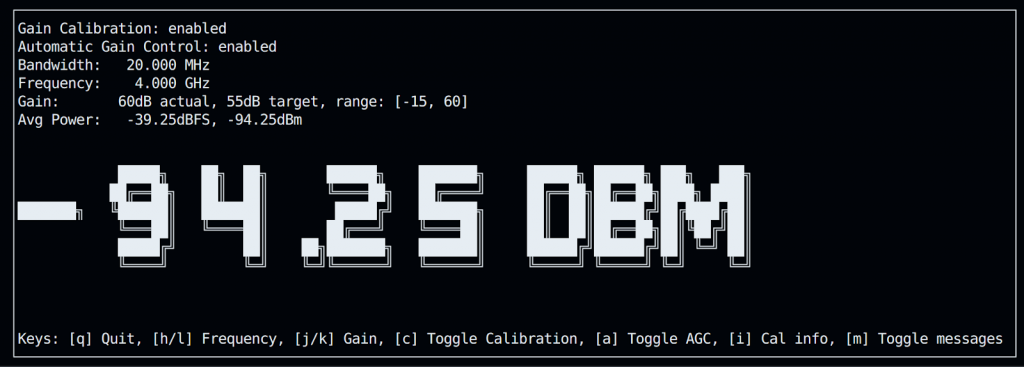
Fully characterized test equipment has long been a gold standard, so we are happy to be bringing a low-cost full gain calibration to the bladeRF 2.0 micro! Gain calibrated bladeRFs can be used to transmit at precise output power levels, and to accurately measure the power of received RF signals – the bladeRF basically becomes a power meter!
(more…)