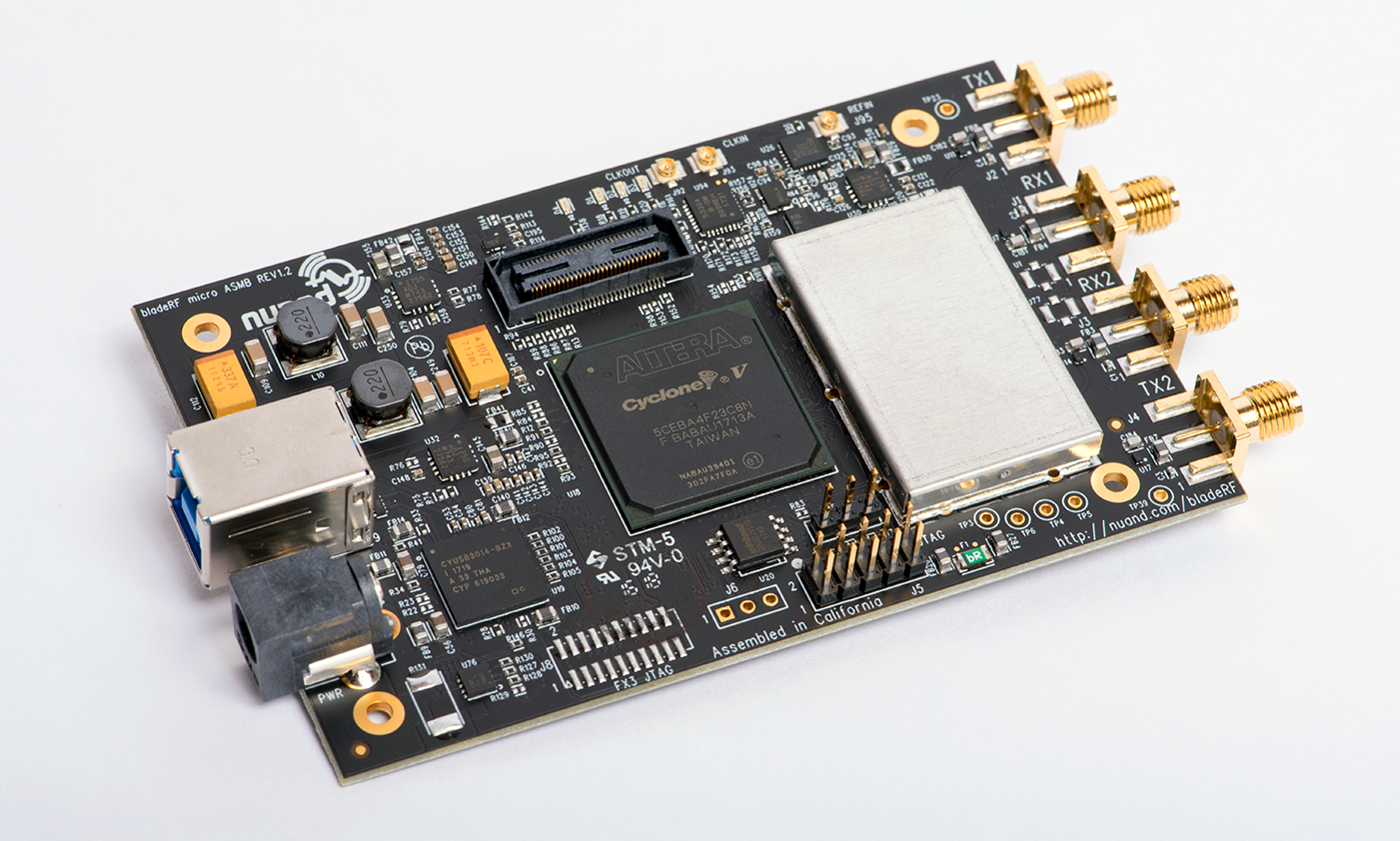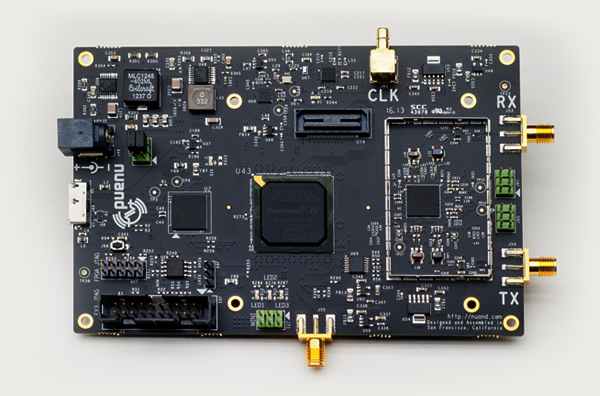

bladeRF-fsk is a host-software based modem utility implemented with continuous-phase frequency shift keying (CPFSK) modulation. It functions as a text chat or file transfer program between bladeRFs with a raw link rate of 250 kbps, originally released as part of the bladeRF github repository in 2016.
(more…)